Introduce .
This is the tool to configure RTK Skytra module.
This article shows you how to use ESPrtk to configure Skytraq's NS-HP GL/BD/GN/GN2 module in BaseStation mode (export RTCM/Skytraq RAW data to TX1 port).
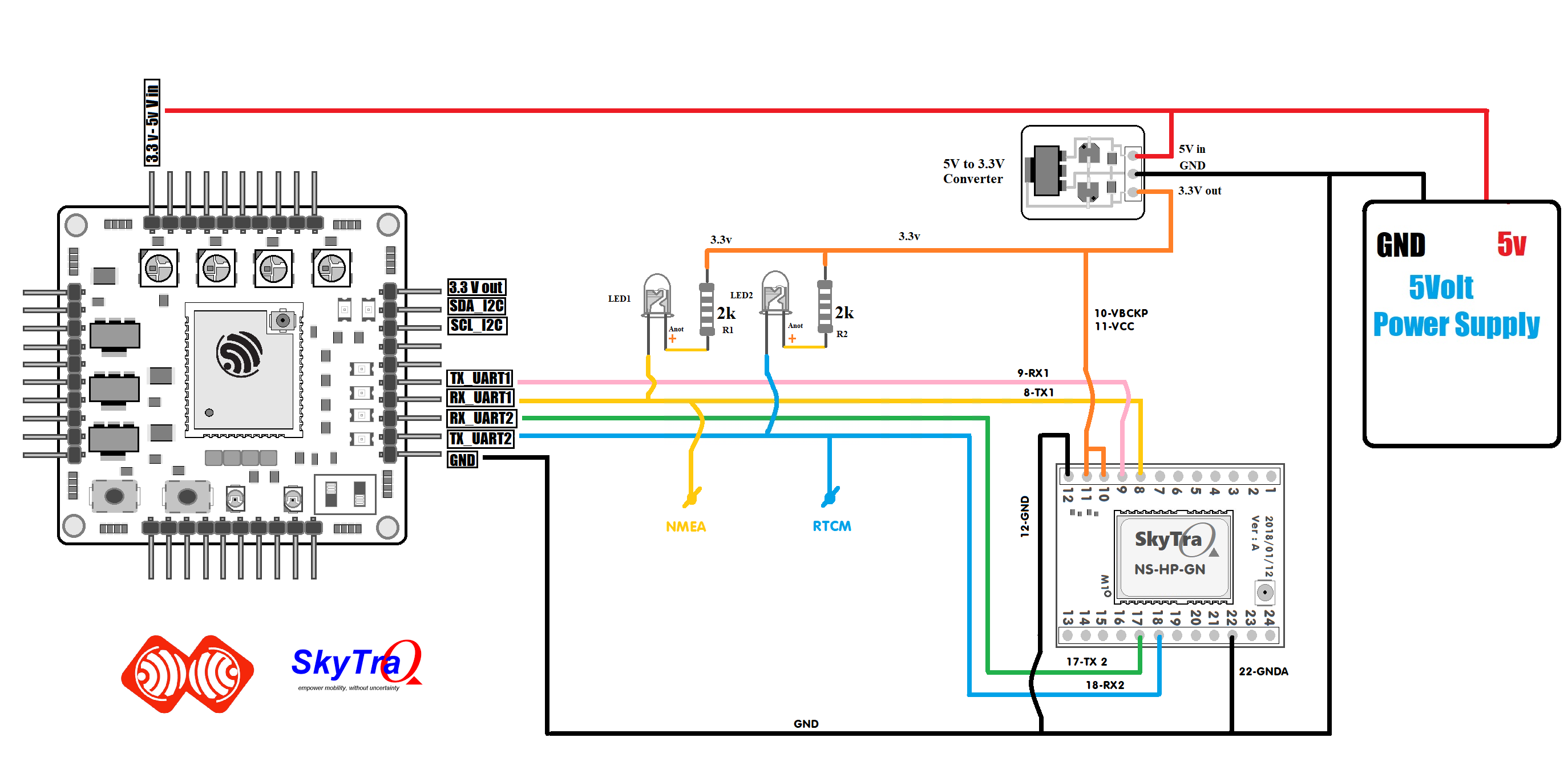
Hardware connect
| ESPrtk |
NS-HP-BD NS-HP-GL | NS-HP-xx | Other |
|---|---|---|---|
| TX-UART1 | RX1 | RX1 | RX-UART Conigure |
| RX-UART1 | TX1 | TX1 | TX-UART Conigure |
| TX-UART2 | RX2 | RX2 | RX-UART Conigure |
| RX-UART2 | TX2 | TX2 | TX-UART Conigure |

After connecting the ESPrtk to the Naspark module, start ESPrtk in "WEB Configure" mode, access the "Navspark" tab and start communicating with the Navspark module with the baudrate and port. (See more Tab Navspark Configure ).
Configure to run Base mode

Known Base Antenna Position
When configured as base, NS‐HP-xx will output its position along with carrier phase raw measurement data over UART TXD. If base NS‐HP-xx antenna will be placed at a location with known position, the position information can be set into NS‐HP-xx using GNSS Viewer.
From RTK pull‐down menu, select Configure RTK Mode And Operational Function, select RTK base mode, select Static Mode and enter antenna latitude-longitude in degrees and ellipsoidal height in meter, update to SRAM+Flash.

Unknown Base Antenna Position
If base antenna position is unknown, set to let it survey for 60sec upon power up. From GNSS Viewer RTK pull down menu, select Configure RTK Mode And Operational Function, select Survey Mode and set Survey Length to 60 and Update to SRAM+Flash.
When later in use, after base NS‐HP-xx gets position fix and self‐surveyed for 60 seconds, it enters into static mode. On GNSS Viewer scatter plot view, one will see the blue dot stop drifting around after static mode is entered; Set Origin button may need to be clicked to center the view in order to see the scatter plot.
Next time powering on the base NS‐HP-xx, it will still start from survey mode again, self‐survey for 60 seconds, with self‐surveyed antenna location at different location unless static mode is chosen and a constant position is entered.
To see what the self‐surveyed latitude, longitude, and altitude values are, from GNSS Viewer RTK pull‐down menu, select Query RTK Mode And Operational Function.
To use the base at some fixed location, use these steps to self‐survey and retrieve surveyed antenna position, then set the antenna position into the base NS‐HP-xx so that it’ll have the same entered position every time it’s powered on later. Noneed to set the antenna position into base NS‐HP-xx if only testing and becoming acquainted with it.

Once base NS‐HP-xx has been properly configured, later usage require only connecting an RTK antenna, apply power, and send TXD base output data to the rover NS‐HP-xx.
Base Stream Format
After configuring NS‐HP-xx to RTK base mode, the default base stream outputs are packaged in SkyTraq RAW measurement protocol. The outputted messages include:
-
1) Message type 0xDE – SV and Channel Status
-
2) Message type 0xDF – Receiver Navigation Status
-
3) Message type 0xE0 – GPS Subframe Data
-
4) Message type 0xE1 – GLONASS String Data
-
5) Message type 0xE2 –Beidou D1 Subframe Data
-
6) Message type 0xE3 –Beidou D2 Subframe Data
-
7) Message type 0xE5 – Extended RAW Measurement
The necessary message types of base stream used for NS‐HP-xx RTK rover mode are only “Receiver Navigation Status (0xDF)" and “Extended RAW Measurement (0xE5)”. To decrease the throughput of base stream, other unnecessary message types can be disabled from the base stream.
From GNSS Viewer RAW pull‐down menu, select Configure Binary Measurement Data Out, disable unnecessary message types, select necessary message types and Update to SRAM+FLASH.
In addition to SkyTraq RAW measurement protocol, NS‐HP-xx also supports RTCM 3 format output. From GNSS viewer RAW pull‐down menu, select Configure RTCM Measurement Data Out, select Enable RTCM Output, select Stationary RTK Reference Station ARP , select MSM7s and Update to SRAM+FLASH.

It’s deserved to be mentioned:
-
1) It’s necessary to restart rover receiver if the format of base stream is changed.
-
2) The format of base stream must be configured to SkyTraq RAW measurement protocol if the operational function of NS‐HP-xx RTK rover mode is moving base mode