Ublox Tab
Introduce
This function allows users to configure Ublox module in the same way as Ublox Center software. Just connect the UART1 port (ESPrtk) to the UART-Configure (Ublox module), select the appropriate baudrate and start the configuration.
This article shows you how to use ESPrtk to configure Ublox's F9P / M8P module in Rover mode (export NMEA data to TX1 port).
Hardware connect
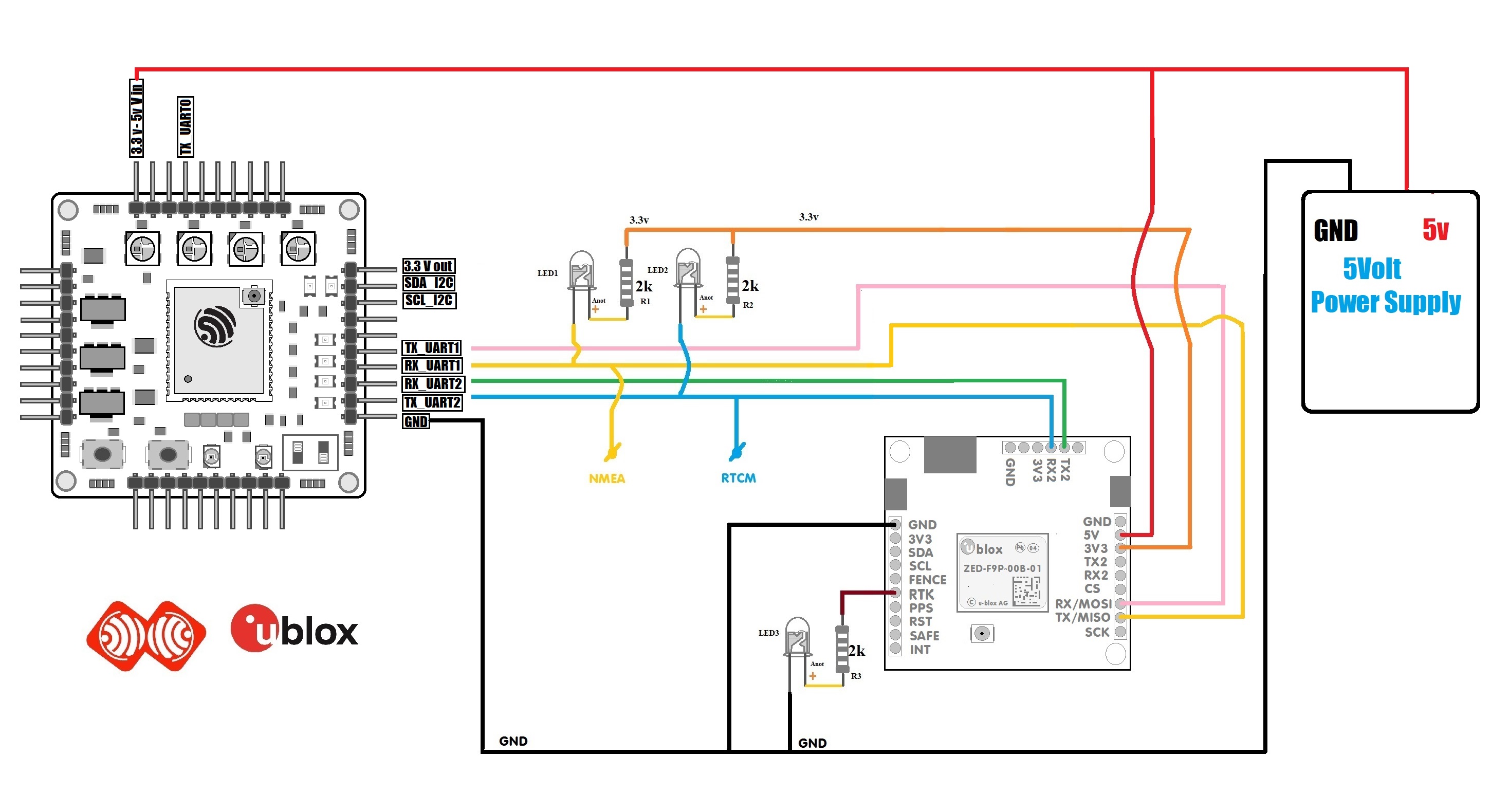
| ESPrtk | ZED-F9P | M8P - LEA -NEO | Other |
|---|---|---|---|
| TX-UART1 | RX1 | RX1 | RX-UART Conigure |
| RX-UART1 | TX1 | TX1 | TX-UART Conigure |
| TX-UART2 | RX2 | RX2 | RX-UART Conigure |
| RX-UART2 | TX2 | TX2 | TX-UART Conigure |

After connecting the ESPrtk to the Ublox module, start ESPrtk in "WEB Configure" mode, access the "Ublox" tab and start communicating with the Ublox module with the baudrate and port. (See more Tab Ublox Configure ).
In the Configuration panel, scroll down to the PRT (Port) section. Here, you need to enter your autopilot's GPS port's baudrate to allow it to communicate correctly. It's necessary, as the link between your GPS and the telemetry is purely serial, and there's no other protocol to stipulate a baudrate.

It's also necessary to modify the frequency of the chip. To do this, on the left panel, look for the RATE (Rates) menu and modify the Measurement period to 200 ms.

Next, get into the MSG (Messages) menu and disable all NMEA messages.

After disabling the NMEA messages, you should also enable the following messages for the UART1 link:
NAV-POS-LLH
NAV-STATUS
NAV-SOL
NAV-VELNED
To do so, find each messages in the droplist and check the UART1 box for each of these messages, without omitting to click Send for each message.




Modifying the dynamic filter can also help. You can change it in the NAV5 (Navigation 5) menu, using the first droplist at the top of the menu.

After doing this tweak, save the whole configuration you've done, by getting into the CFG (Configuration) menu on the left panel, selecting all four memories on the right, and clicking Send.

Now that the configuration is stored into the chip, you can disconnect your RTK module from the computer and plug it to your autopilot!